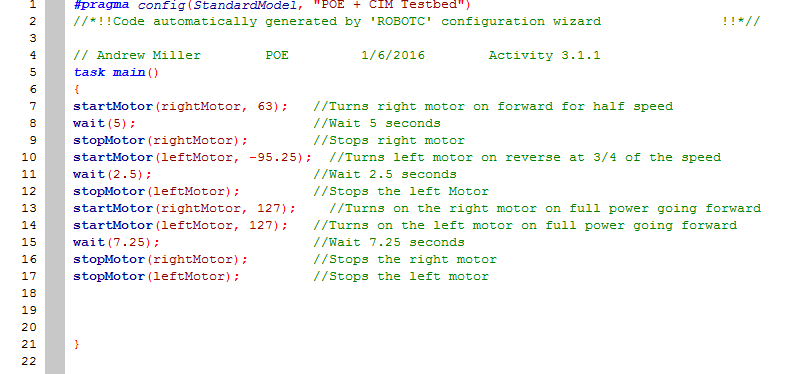
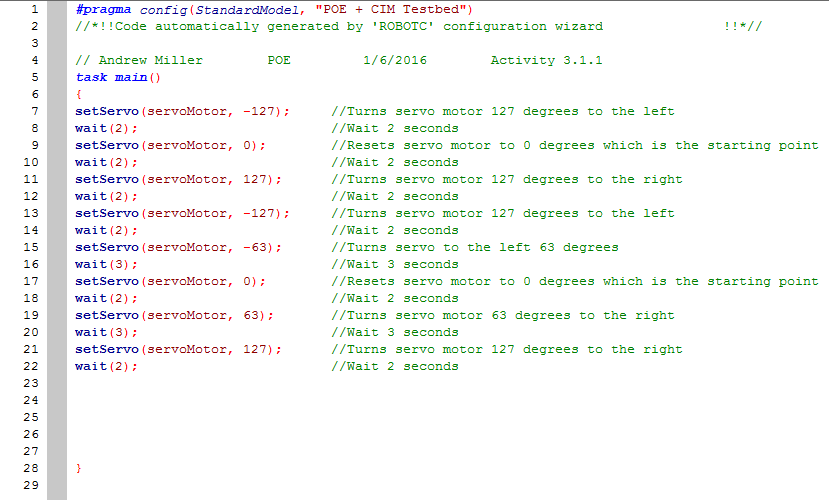
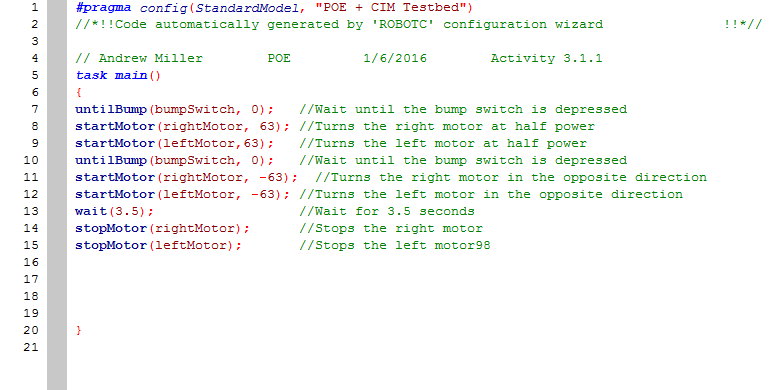
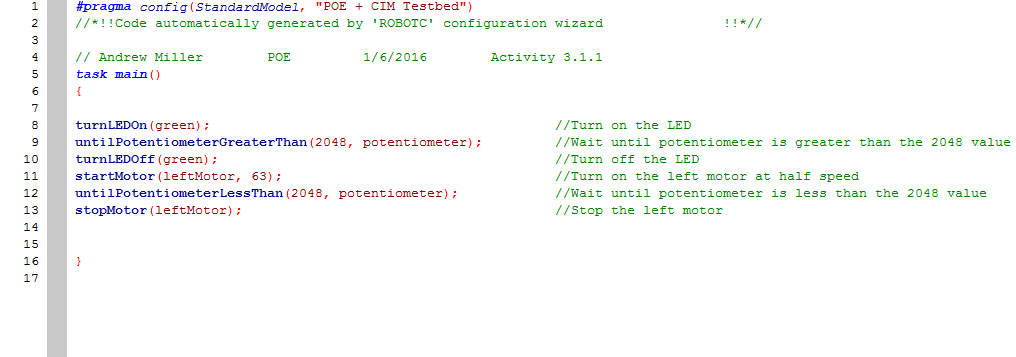
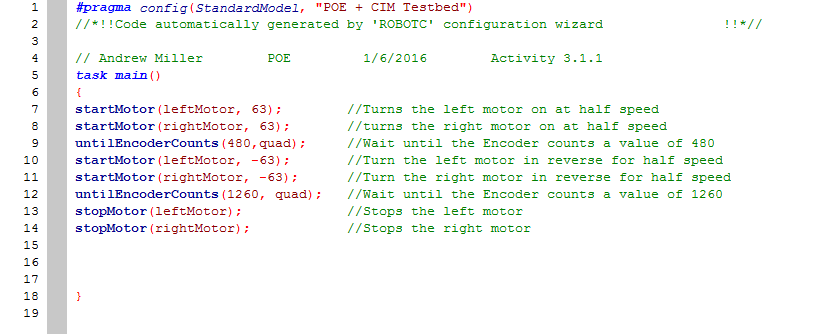
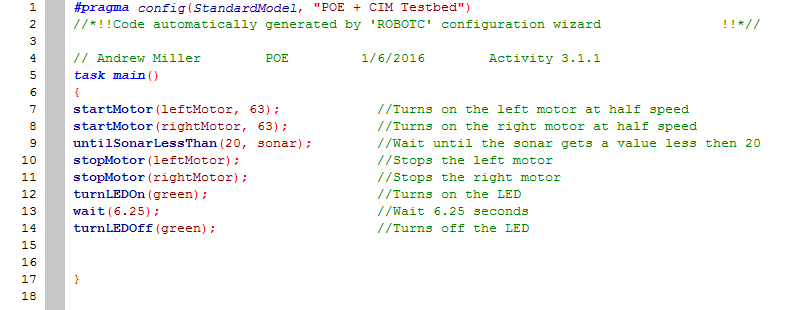
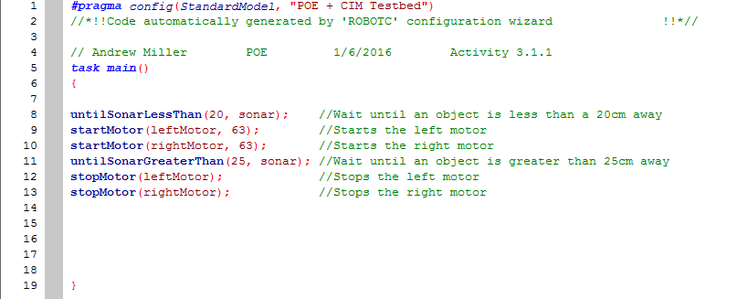
Activity 3.1.1
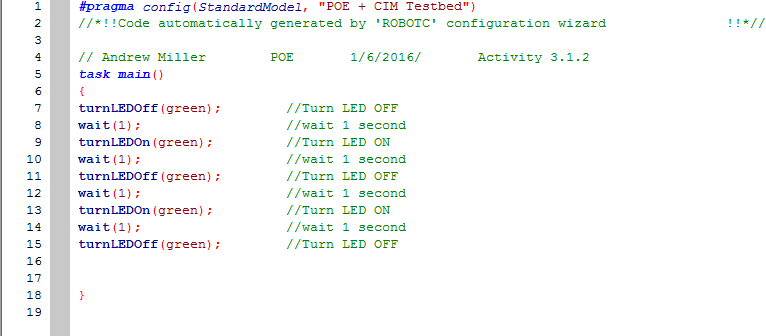
Activity 3.1.2
Part 1
Part 3
Part 4
Activity 3.1.3
Part 2
Part 3
Part 4
Part 5
Part 6
Activity 3.1.4 part 4
Part A
Part B
Part C
Part D
Conclusion questions
3.1.1
1) Motors and sensors on the robot can be used to helps the robot move around its environment with out human help.
2) I thought that when the ultrasonic gets closer to an object the value would increase but it decreases instead.
3.1.2
1) I didn't encounter any problems other then needing a testing bed.
2) The outputs could be used for something like turning one set of wheels on a robot so that it turns.
3.1.3
1) No problems where encountered during 3.1.3.
2) The sensors could allow a robot to move around with just sensors and programming without human help. A lone follower would allow a robot to follow a set route around a building while a potentiometer can be used with a steering wheel and a number switch can help a robot understand if it runs into a wall or other obstacle in its path.
3.1.4
1) While coding I ran into a couple of errors that wouldn't allow testing to be done.
2) Loops could be used for the robots decision making which would allow the robot to decide which option is best for it at that moment in time. Such as turning on a flashlight when it is dark and then turning it off when it is bright.
1) Motors and sensors on the robot can be used to helps the robot move around its environment with out human help.
2) I thought that when the ultrasonic gets closer to an object the value would increase but it decreases instead.
3.1.2
1) I didn't encounter any problems other then needing a testing bed.
2) The outputs could be used for something like turning one set of wheels on a robot so that it turns.
3.1.3
1) No problems where encountered during 3.1.3.
2) The sensors could allow a robot to move around with just sensors and programming without human help. A lone follower would allow a robot to follow a set route around a building while a potentiometer can be used with a steering wheel and a number switch can help a robot understand if it runs into a wall or other obstacle in its path.
3.1.4
1) While coding I ran into a couple of errors that wouldn't allow testing to be done.
2) Loops could be used for the robots decision making which would allow the robot to decide which option is best for it at that moment in time. Such as turning on a flashlight when it is dark and then turning it off when it is bright.
